
研究交流
《设计》专访|谢宇伦:多指灵巧手 DoraHand
来源:设计杂志微信公众平台 时间:2021-06-26
谢宇伦,深圳蓝胖子机器智能有限公司R&D部门工业设计师,广东省2020年度十大优秀工业设计师。主导并参与设计多款物流搬运机器人、机器人灵巧手、复合型移动协作机器人、RSS多机器人调度系统、智能装箱系统等,用最少的资源、最少的流程,最大化解决用户的痛点与刚需,用设计创造价值,助力人工智能技术在各行业的普及。
获奖作品代表
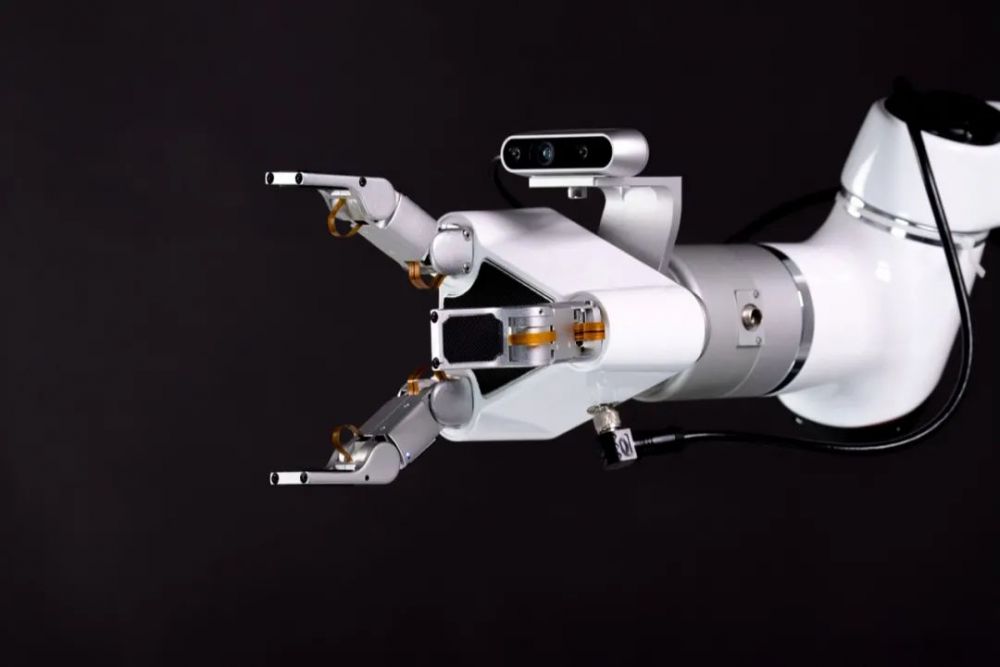
多指灵巧手 DoraHand
中国智造大奖-产业组 银奖
设计方:谢宇伦 王涛 谢争 陈树渠 李袁 张琰
DoraHand是全球首款基于手指模块设计的多指灵巧手,有效解决多指灵巧手成本高、不易维护的痛点,可应用于机器人灵巧操作及多种类物品的复杂抓取场景,采用特殊的传感器设计,结合多自由度配置,既能适应绝大部分物体的抓取需求,又能降低灵巧手成本,从而推广其在科研、工业、服务等领域的应用。
DoraHand

DoraHand

DoraHand 5F

复合型移动协作机器人DoraMOMA
《设计》:请介绍下蓝胖子机器智能(Dorabot)。
谢宇伦:蓝胖子机器智能(Dorabot)于2015年扬帆起航,是一家有着雄厚技术背景的智能无人仓整体解决方案供应商,运用机器人视觉、运动规划、规划和推理、自主导航、多机协作、机器学习等技术,为物流、快递、电商仓储、海港、空港、先进制造等场景,提供包含分拣、运输、码垛、入库、装载等环节的软硬件相结合的一站式解决方案。
公司产品主要包括软硬件相结合的上件机器人、分拣机器人、自主移动机器人(AMR)、码垛机器人、装载机器人等,并积累了多种规划及优化算法,包括智能装箱算法、智能调度算法以及多机规划算法。
蓝胖子机器智能一直坚持人才多元化、市场国际化战略。公司总部位于深圳,同时在广州、香港及澳大利亚布里斯班、美国亚特兰大、新加坡设有研发运营中心,现共有来自10余个国家的员工近200人,其中80%为技术人员。
《设计》:多指灵巧手的研发是何时开始的?项目从研发开始到产品量产上市用了多长时间?
谢宇伦:项目成立于2016年,此次参赛的多指灵巧手DoraHand 3F从2019年7月开始立项设计,至今已经历了4个版本的迭代升级:
第一版本-概念验证:基于实际需求及市场情况,进行产品的初步设计及关键技术验证;第二版本-产品原型:根据验证的关键技术,优化产品定义,设计产品原型;第三版本-稳定版本:实现产品性能的稳定,根据相关行业标准及认证进行验证;第四版本-初代产品:综合考虑需求、性能、稳定性的可推向市场的初代产品。
《设计》:项目研发过程中最具挑战性的阶段是哪个?如何攻关的?
谢宇伦:对产品的定义是研发过程中最具挑战性的。相较于市面上几十万元甚至上百万元的灵巧手产品,我们希望设计出一款高性价比的灵巧手,来推动相关技术的落地与应用。基于这一设计理念,我们通过自研力传感器及模块化设计来达到了技术与设计的平衡。
在实际设计中,我们综合考虑和评估了针对各类场景所需要用到的功能、精度、自由度等因素,最终完成了对DoraHand的定义。由于我们处于物流行业,会面临诸多传统硬件很难解决的问题,因此希望借用机器人灵巧手的推广,让更加先进的机器人抓取操作技术进入更多的领域,并得到应用,创造更多价值。出于实用主义和形式追随功能的考量,DoraHand产品设计采用极简风格,确保在商业、技术、设计三者之间达到最佳平衡点。手指设计是这款产品的核心,我们希望用最少的空间达到最大的功能,它平直的手指设计和垂直的指尖设计就是设计师和工程师在功能和设计上的双赢。
《设计》:多指灵巧手的设计中应用了哪些新技术/设计工具?
谢宇伦:作为目前全球首款基于手指模块进行设计的多指灵巧手产品,我们在很多关键技术上都是首创。
1.模块化,每根手指都有独立的驱控和感知单元,能够独立工作,并且支持热插拔。从客户角度而言,提升实用性的同时降低了维护的门槛,更利于灵巧手的推广使用;从研发角度而言,方便我们后续基于模块进行系列产品的拓展;
2.灵敏性,这体现在力触感知单元,这款三指版本灵巧手拥有各类传感器共42个,每根手指和手掌配备的力触感知单元能够获取1024级的有效力信号,并且可以在感知力的大小的同时获取施力位置,让机器人获得可以与人手媲美的感知能力,为机器人最终实现精准柔性抓取提供条件。
3.灵巧性,这体现在手指关节自由度配置和控制,我们的灵巧手具有8个自由度,每个自由度都可以独立控制,能够组合出多种手势,适应并满足大部分生活场景中的物体抓取需求。
多指灵巧手 DoraHand系列产品从模块化产品硬件到内部的力触传感单元以及智能算法,实现了核心专利自主化,目前已拥有相关核心专利14项。
《设计》:产品研发过程中,设计师和工程师是如何协作的?
谢宇伦:团队采用项目制管理,设计师和工程师同属于一个项目PM管理,便于双方保持高效协作。设计师不仅仅完成外观设计,协助内部结构优化,同时也跟进EVT工程验证、DVT设计验证、PVT生产验证,确保设计的完成度,同产品一起成长;工程师在兼顾设计要求的同时完成功能实现,保证产品研发的专注度,提升产品行业竞争力。在具体的项目进程中,基于相同的设计理念和最终目的,我们不断努力进行设计迭代,按需随时进行全团队评审,确保设计与科技的完美结合。
《设计》:多指灵巧手在市场上是否有竞品?多指灵巧手的核心竞争力是什么?
谢宇伦:国内市场尚无同类型的竞争产品,多指灵巧手产品目前仍以国外产品为主,代表有Robotiq、SDH Schunk、BarrettHand、SVH Schunk、DLR/HIT II、Shadow Hand等。
高性价比是DoraHand的核心竞争力。第一,自主设计的力触感知模块单元能够极大程度上降低产品对昂贵进口传感器的依赖,极大降低产品零件成本;第二,模块化设计能够提升产品使用便利性,并极大降低产品的维护成本;第三,在售价方面,本产品只有国外相同功能同类灵巧手的三分之一,大大降低了灵巧手的科研及商用门槛。
《设计》:多指灵巧手可以应用在哪些行业和场景?
谢宇伦:目前我们这款产品的目标使用场景涵盖了科研、服务、物流等领域。一方面我们提供硬件平台给科研机构,用于其对机器人操作相关技术的研发,涉及的专业方向包括计算机、机械、电子、嵌入式等;另一方面我们针对不同客户的实际需求进行针对性研发,提供特定解决方案,例如服务行业的递送服务,医疗环境的移液操作,工业场景的巡检功能等。
此外,除了这款三指获奖作品,我们基于模块化的手指,为研究型的客户提供了定制化的五指版本,用于实现远程操作任务。DoraHand还可结合我们自研的复合型移动协作机器人DoraMOMA,为客户提供室内物体抓取及搬运等服务。
《设计》:对于多指灵巧手是否还在进行迭代研发?预期实现怎样的功能?
谢宇伦:目前DoraHand多指灵巧手在初代产品的基础上有了更新的版本,并且已经取得了相关行业认证,正在逐步推向市场。灵巧手是一个技术的集大成者,基于这些核心技术,我们可以一方面推动力触感知能力在机器人领域的应用,让更多机器人获得触觉,另一方面推动高自由度末端执行器的应用,让机器人能够解决更多的实际问题。我们希望未来DoraHand能够衍生出不同的分支,在行业产生更大的影响力,促进多指灵巧手的规模化落地应用,推动行业相关技术升级。

蓝胖子合影

多指灵巧手设计团队
